現時通用的義足只適用在平坦路面,遇上崎嶇不平的地面,則舉步維艱。原來關鍵在於,義足沒有天然足部的腳趾和腳跟去協助適應路面,很容易令用家失去平衡。
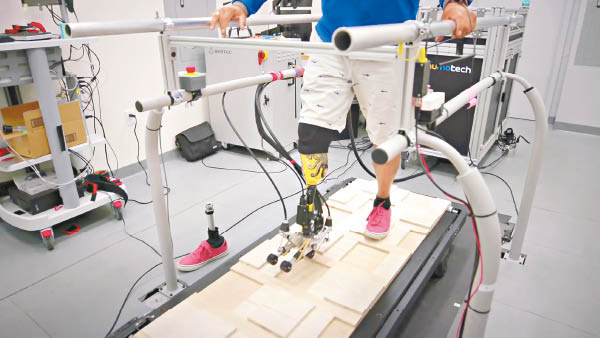
美國史丹福大學的研究小組為此設計出「Prosthetic emulator」(圖),用三個橡膠接觸點配合電動摩打,模仿腳趾、腳跟與地面的互動,使用家步行得自然順暢。目前有關系統僅處於實驗階段,未知何時可以推出。
本報綜合報道